
UTS在线
多年来,Rosie和Sandy两台设备一直在地标建筑悉尼海港大桥的维护部门服役。这座大桥形似衣架,两台机器人承担着为其清除老旧油漆与铁锈的繁重高危作业。
但这两位“工人”并非人类,而是由悉尼科技大学机器人研究所联合新南威尔士州交通局研发、重达25千克的自主机器人。
杰出教授Dikai Liu是这批机器人的研发核心,他表示:“桥梁维护中的喷砂除锈作业致命、危险又脏乱。作业中会产生大量含铅油漆粉尘,人体绝不能吸入。喷砂枪威力巨大、难以握持。工人长期操作,极易患上背痛疾病,这类工作对人类而言挑战极大。”
但对机器人来说却并非难事。Rosie和Sandy依靠传感器在错综复杂的桥梁结构中自主导航,绘制周边环境三维地图,精准移动至作业点位。操作人员按下喷砂按钮后,机器人便有条不紊地逐层剥离老旧漆面。
另一款应用于该桥梁的基建机器人——履带式攀爬机器人,借鉴尺蠖的蠕动行进原理,可抵达人工难以触及的区域,目前也已完成实地测试。
UTS杰出教授Dikai Liu:“我们与新南威尔士州交通局合作,专为海港大桥打造了三款运维机器人。对方的核心诉求,是借助新技术改善作业环境、保障一线工人安全。我们研发的喷砂除锈机器人为全球首创。即便投入使用已逾十余年,其搭载的技术依旧十分先进。”
这批机器人,只是悉尼科技大学机器人研究所顶尖科研团队的研发成果之一。
深耕这一新兴前沿领域二十余年,Dikai Liu教授堪称基建机器人领域的权威专家。
他解释道:“基建建设与维护成本高昂,项目推进往往阻碍重重,劳动力短缺更是整个行业面临的一大难题。行业合作方迫切需要新技术,用以优化作业条件,化解各类安全生产隐患。”
悉尼科技大学机器人研究所凭借机器人研发及配套高端人工智能技术享誉业界。
从高耸的海港大桥,到幽深的水下区域,这些机器人可在各类复杂极端环境中作业,完成桥梁、码头等设施的养护工作。
研究所负责人Sarath Kodagoda教授表示:“我们是全球顶尖的机器人研究团队之一。团队秉持以人为本的研发理念,设计的机器人旨在辅助人类更高效地完成工作。”
深耕地下,接手高危脏活
过去十年间,Kodagoda带领团队与悉尼水务局深度合作,研发多款机器人,有望对城市数百公里的地下下水道开展巡检工作。
仅悉尼水务局,就管辖着超500公里大型混凝土管道与2.3万公里小型管线,每年运维预算超4000万澳元。
他介绍:“管道维护的核心难题,在于精准判断管道破损的时间、位置与成因。目前这类巡检仍依靠人工下井排查,但下水道环境极其恶劣:潮湿昏暗、噪音嘈杂、气味刺鼻。我们研发的机器人可从检修井投放至管道内部,精准检测混凝土腐蚀问题,全程安全高效。”
团队现已研制出四款不同型号的机器人,适配各类市政管线设施,穿梭于下水道与管道内部,检测腐蚀、堵塞等隐患。
各款机器人尺寸各异,可适配不同口径的管道与隧道;同时搭载视觉成像、三维探测及雷达感应系统,精准识别设施缺陷与腐蚀问题。
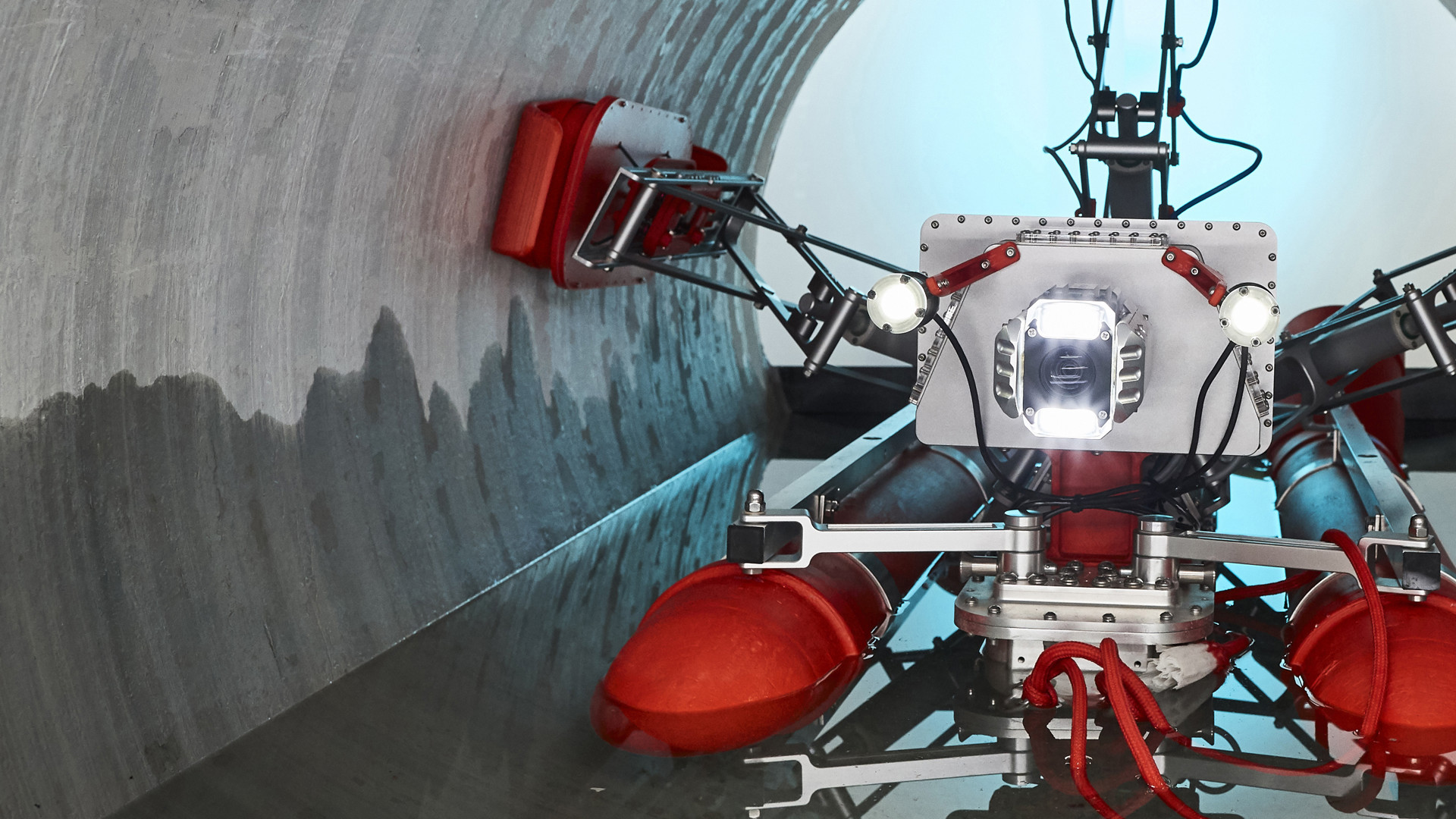
其中,大型CRAFT机器人为遥控漂浮式设备,结合探地雷达与摄像系统,构建大型管道三维模型,快速锁定需要重点排查与修复的隐患区域。
UTS教授Sarath Kodagoda说到:“这批下水道巡检机器人已多次投入悉尼供水管网实战应用,在管道破损排查方面成效显著。让工人脱离高危防护装备,转而远程操控机器人作业,是多方共赢的选择。这并非取代岗位,而是将高危工作转化为安全作业模式。”
这项技术的核心价值在于提升职场安全,而非替代人工。
“该技术能创造显著的经济、社会与环境效益。通过采集关键数据,助力运维方及时决策,削减设施翻新成本,同时守护生态环境,保障人员健康与安全。”Kodagoda补充道。
据团队预估,技术全面落地后,每年可为悉尼水务局节省数百万澳元的管道运维及结构翻新开支。
这项技术更有望彻底革新澳大利亚乃至全球,混凝土输水管道与污水基建的巡检模式。
赋能建筑,革新建造模式
悉尼科技大学自研机器人不仅服务于城市基建养护,更在重塑未来建筑施工模式。
三年前,默多克大学打造全新全木质建筑布拉・卡蒂津大楼时,便选用新型建筑机器人开展实地试验。
Liu教授团队携手工程公司奥雷康,研发出昆达机器人。这是一款自主作业机器人,可安装最长30米的木质长螺丝固件。
为期两周的实地测试中,昆达机器人灵活穿梭于施工现场,精准安装上百颗螺丝,作业误差控制在5毫米以内,施工质量远超人工操作标准。
Liu教授指出:“相比人工,机器人打螺丝精度更高,钻孔力度与操作稳定性也更均衡。这类建筑技术创新,或将彻底改写木结构建筑的建造方式。”
长远来看,自动化设备能够缓解建筑行业长期劳动力短缺的困境,提升生产效率。与此同时,机器人承接重复性体力劳动,可降低施工成本,进一步保障工人安全。
但Liu教授坦言,建筑机器人规模化落地仍面临诸多挑战。施工现场人员密集、工具繁杂、环境嘈杂多变,是机器人作业面临的最大难题。
“建筑工地场景多样、结构复杂且时刻处于动态变化中,对机器人的适应能力要求极高。我们研发的智能机器人,能够在复杂干扰环境下,稳定完成核心施工任务。”
人机协同,探索全新协作模式
基于行业现状,Liu教授的团队持续探索建筑工地的人机协同新模式。
2024年,全球首个人机协作建筑领域专项科研合作项目正式落地。
这项由澳大利亚研究委员会出资2300万澳元打造的可持续韧性建筑人机协同创新研究中心(HaRTCon),汇聚悉尼科技大学等七所高校专家,联合15家建筑企业与行业机构共同研发。
人机协同是一门新兴领域,融合人类的判断力、创造力、环境适应力,以及机器人的高精度、强动力与稳定作业优势。
早期的Rosie、Sandy机器人仅支持按键操控,而新一代机器人已实现更智能的人机交互。
该研究中心团队正研发定制化智能技术,应用于墙面贴砖、工业喷涂等施工场景。操作人员无需键盘、摇杆等传统控制器,直接语音指令即可操控机器人作业。
研究同时聚焦建筑行业人机协作的人文与经济价值,优化岗位设计,提升行业对女性从业者、高龄工人的包容性。该研究中心的科研项目将持续至2029年。
Liu教授预判:“未来,结合人工智能与机器学习的机器人系统,将大规模落地建筑场景,辅助人工完成各类作业。智能机器人终将广泛应用于各类市政基建的建设与养护工作,而我们,正在亲手推动这一未来加速到来。”
关闭



